Research
Material Training
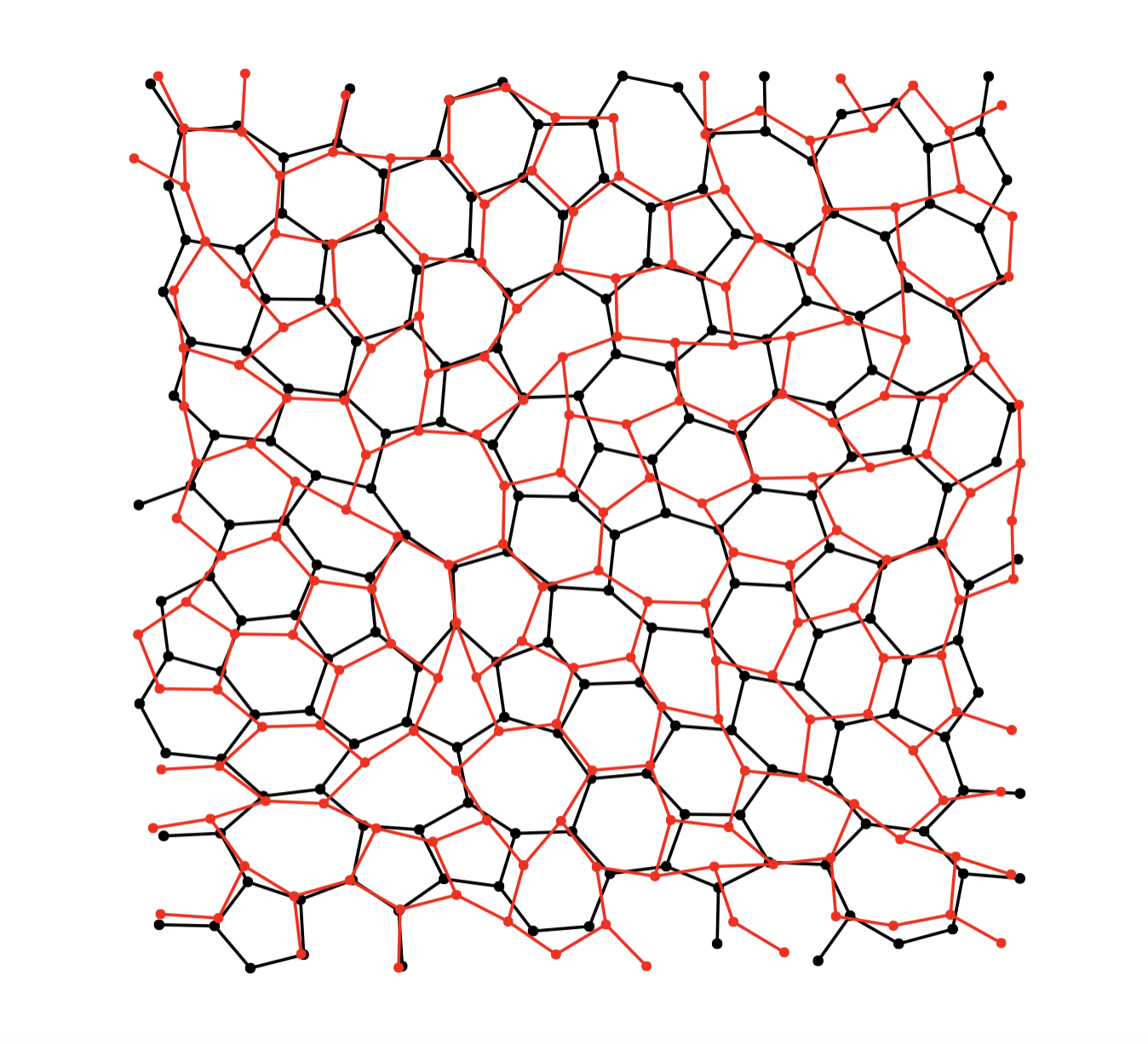
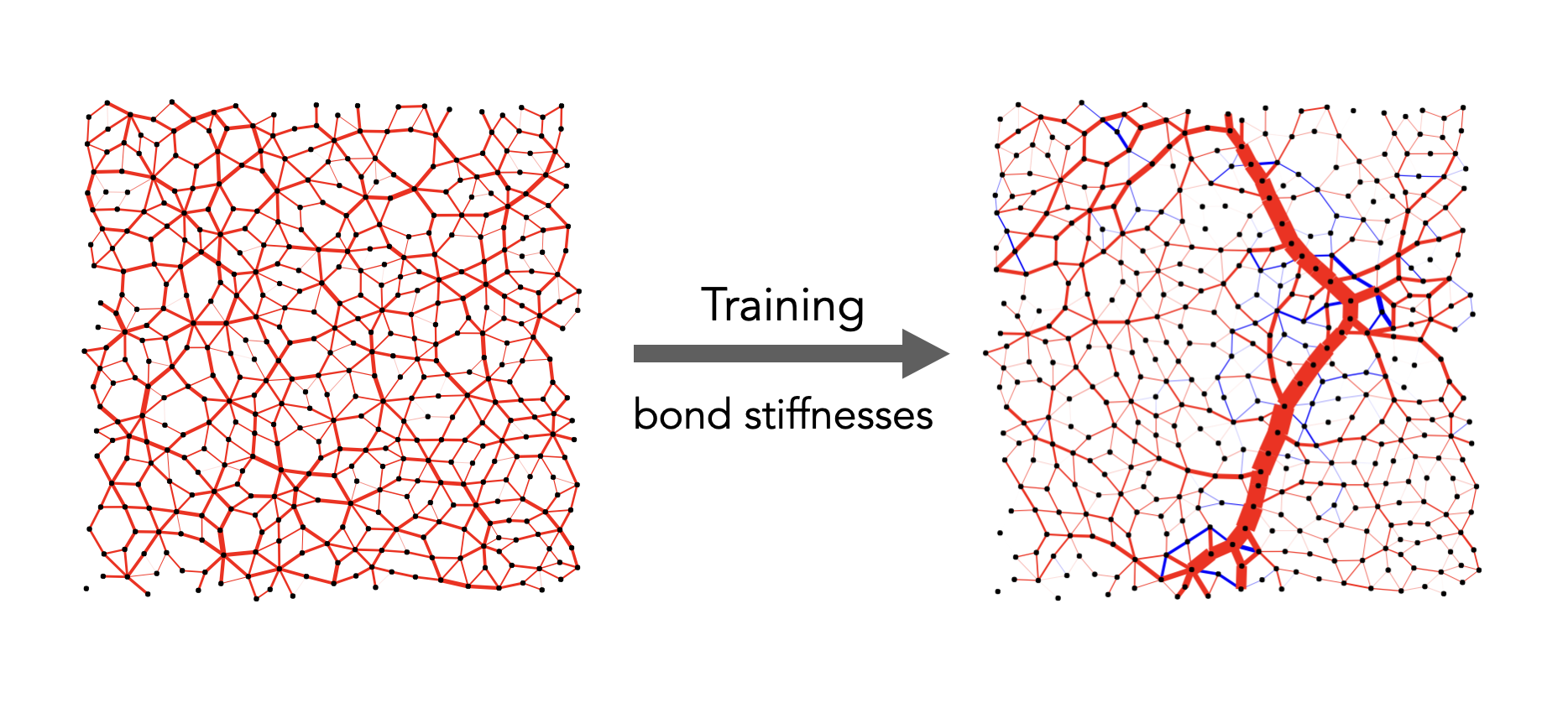
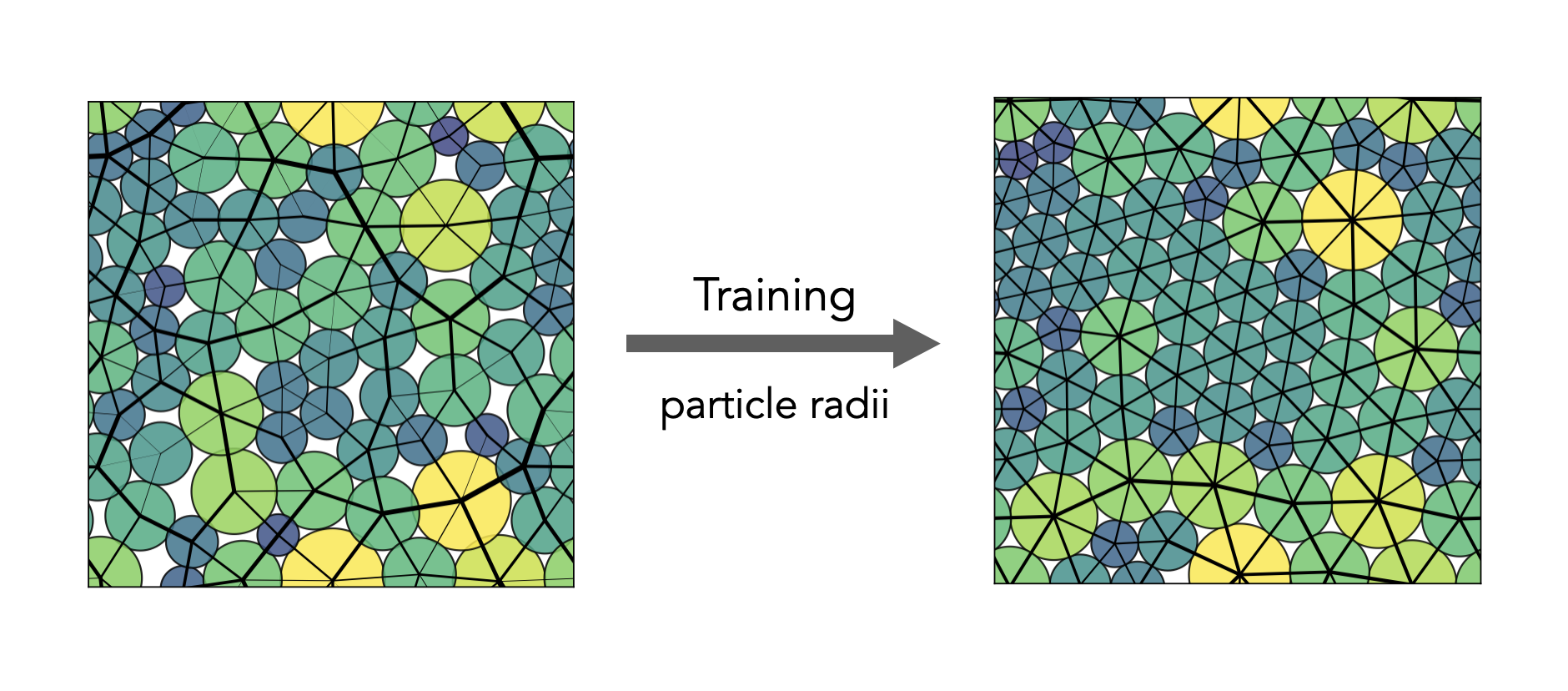
Disordered materials, like glasses or granular media, have this intriguing quality—they can exist in a multitude of meta-stable states that are distinguished by their microstructure. While most of these states share similar bulk properties, occasionally, one stumbles upon rare states that enable the material to display unusual and interesting behavior.
The catch, of course, is identifying such rare states and guiding the material from its typical (ordinary) state to these exceptional (extraordinary) states. We tackle this challenge with special optimization protocols that involve systematic introduction and manipulation of auxiliary degrees of freedom in the material preparation process. Essentially, our method entails providing the material with a bit of additional space on the rugged energy landscape to explore and discover a pathway towards desired local minima. Currently, we are looking into various types of degrees of freedom that can lead to multi-functionality in soft and biological matter.
Memory Formation in Materials
Many materials in our everyday environment have the ability to retain an imprint of their history, which can be retrieved using specialized tools and methods. This ability, often called material memory, covers a range of possibilities from seemingly mundane types of memory to those demanding sophistication for encoding or retrieval. An example of simple memory is the information stored in a system regarding the direction in which it was moving prior to observation. For instance, picture a box containing two engaged gears with small backlash. Just by looking at their relative positioning now, we can retrieve some information about how they were moving before we observed them.
Generally, we recognize memory as an organizing principle for studying the properties and dynamics of matter. In our pursuit of understanding, we are particularly interested in measuring different types of memory, like the memory of direction in gears, using tools from information theory.

Bioinspired Metamaterials
Many caterpillar species have been reported to exhibit visible physical reactions to a range of auditory stimuli. Specifically, tent caterpillars display distinctive head-flicking movements when exposed to sounds within the frequency range of 300 -- 2100 Hz. This behavior is identified as a defensive mechanism employed by individual caterpillars to put off aerial insect predators or parasites. However, within a given colony of tent caterpillars, one finds considerable variability in how individuals respond to sound from a single source. Some caterpillars remain motionless, while others show synchronized flicking. The reasons for this diversity in responses are unclear.
We are investigating factors like the overall colony shape and the influence of neighboring caterpillars on the observed variations. Understanding the mechanisms behind varied responses in materials like caterpillar colonies paves the way for rational design. For example, if different caterpillars in a colony react differently to the same sound, arranging them on a surface in predetermined ways might yield desirable movement patterns that can be 'turned on' by exposing the colony to a given sound. This concept inspires us to consider designing materials with constituents that exhibit various responses to the same stimulus, where controlling the geometry can lead to desirable movement patterns in the material, useful for transport.

Image credit: Wisconsin Department of Natural Resources
Reconfigurable Soft Structures
Imagine a soft and flexible network structure, where the bonds are like loose guitar strings. If you apply tension to the network by pulling the sides tightly, it will rigidify and turn solid—similar to how a guitar string goes from floppy to rigid when tightened. In a network with multiple floppy modes of movement (i.e., zero-energy-cost ways to change the shape), one can generate various rigid structures by adjusting the configuration in the floppy phase and quasi-statically increasing the tension until the system rigidifies. We are exploring how this concept (low-energy transition between two rigid configurations by going through a floppy phase) can be applied in crafting simple robotic arms capable of shape-shifting through rigidity transitions.